
Esta página está en desarrollo, puede presentar datos incompletos, confusos o erróneos.
Ante cualquier duda, contacta con el autor.
Teniendo en cuenta lo muy resistente que es el HK Mini Swift, hay pocas probabilidades de que realmente utilicemos el crash-kit para repararlo; el pegamento para foam y/o la silicona caliente, o incluso la cinta adhesiva de papel que emplean los pintores son capaces de recuperar casi cualquier rotura. En esas condiciones, tal y como lo aparenta, si nos conviene, podemos convertir el crash-kit en un segundo Mini Swift, si bien nos faltarán algunas piezas.
Para el montaje del crash-kit precisaremos de las siguiente piezas adicionales:
El soporte de motor original en aluminio se incluye con el fuselaje de recambio, pero no con el crash kit. Prepararlo y hacerlo con suficiente ventilación es una de las partes más laboriosas del montaje. En contrachapado de 1,5mm, con unos taladros de 5 y 6 mm, lima y paciencia, podemos hacerlo suficientemente resistente como para aguantar impactos frontales.


El diámetro requerido está entre los 27 y 27,5 mm, para trazarlo, una moneda de dos Euros es ligeramente más pequeña, 25,5mm, si trazamos el contorno con 1 mm de separación, se ajusta correctamente a lo necesario.
Unas arandelas de presión en las tuercas y/o una pequeña gota de fijatornillos asegurarán que las posibles vibraciones, dilataciones y golpes no desmonten el soporte.

Como el motor pesa ligeramente más que el original y va un poco más adelantado, compenso instalando el salvalipos en la parte posterior, facilitando así un centro de gravedad más adecuado. Los cables del salvalipos correrán por la misma ranura que los de los servos.
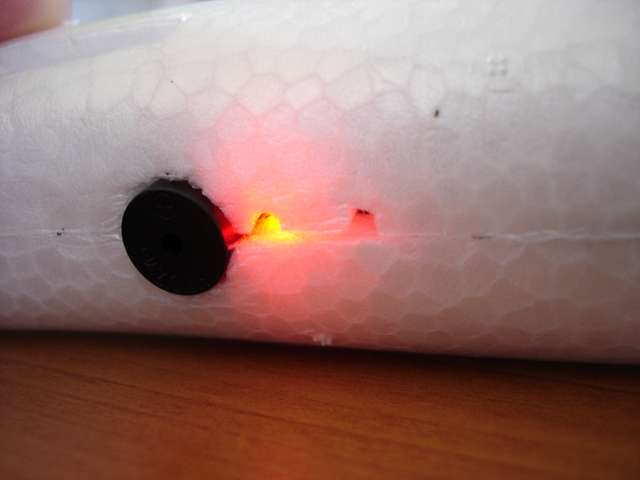
A pleno sol, normalmente las luces del salvalipos no son visibles a través del fuselaje ni teniendo el modelo en la mano. Para facilitar su visión, sin pretender que sean visibles en vuelo, practico dos pequeños orificios encima de los dos LED que lleva (azul y rojo). De este modo no harña falta hacer sobre con la mano sobre el modelo para ver qué están indicando las luces, que son un buen indicador de si está la batería en condiciones de hacer vuelos adicionales.
La conexión del salvalipos será directamente sobre la placa del ESC, de modo que en caso de una mala conexión entre la LiPo y el ESC que cuando utilicemos a fondo el motor y aumente el consumo provoque un descenso de voltaje, el Salvalipos lo detectará.

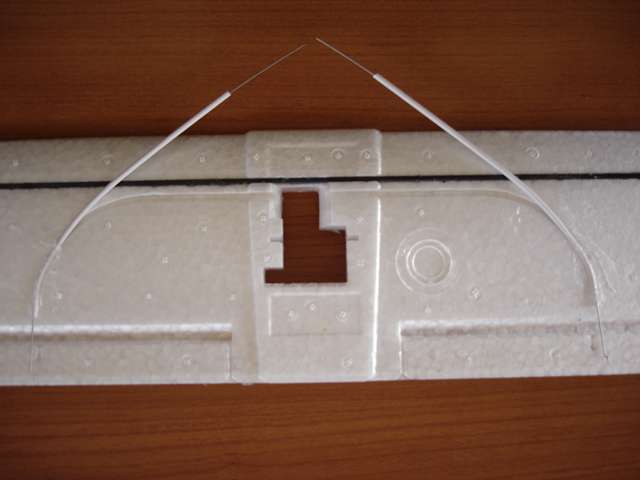
Liberar y suavizar los alerones, lijando suavemente la zona superior por la que dobla, observando si se perfora. En caso de exceso, con cinta adhesiva transparente común o cinta reforzada, resolveríamos el problema.
Primero pegar parte cercana a los alerones de los tubos, conteniendo los alambres -y sin olvidar que tienen diferentes medidas- con pegamento caliente, evitando calentar en exceso los tubos.
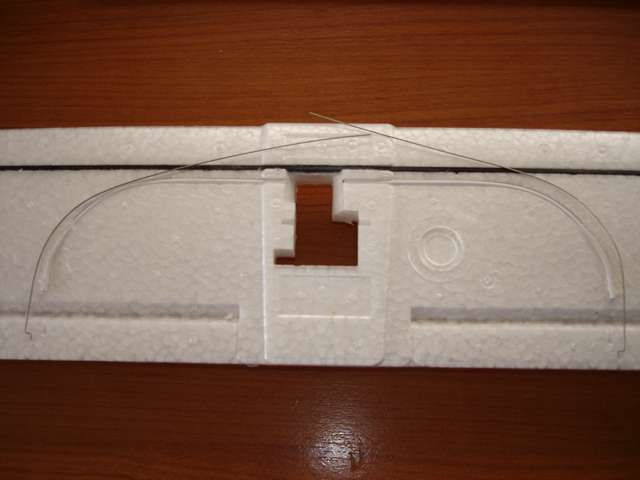
Pegar el resto con pegamento para foam o algunos puntos de pegamento caliente.
Dar parte de la forma curva a cada pushrod para que no roce en exceso e insertarlo.
Pegar los cuernos de los alerones, insertados ya los alambres. Si los cuernos hicieran tope entrando por la parte superior de los alerones, hay que cambiar el orden de montaje, introduciéndolos y colocando los alambres antes de pegar los tubos.
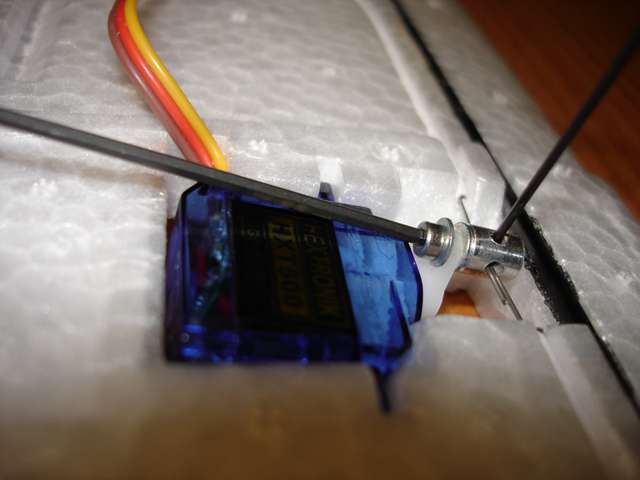
El servo original es uno de 8g, cuyo grosor roza lo excesivo. En dos ocasiones he montado servos de 5g HXT500, pero aun estando bien aligerado el movimiento de los alerones, entre que un solo servo maneje ambos alerones y la curvatura de los tubos de los pushrods, trabajan más forzados de lo deseable cuando se los lleva al extremo, si bien en vuelo no será algo habitual. En una ocasión, un servo original tenía etiquetado, mostrando así que es un CYS-S0008. Un ElectriFly ES50 Nano de 9g, montado en el tercer crash kit encaja todavía mejor que el original por su reducido grosor de tan solo 10mm. El HXT tiene un par de 0,8kg/cm, los otros dos lo tienen de 1,2kg/cm a 4,8V, un 50% superior y mucho más recomendable.
La longitud del cable mínima es de 15cm, como el caso del HXT500. Si instalamos un servo con un cable más corto, dificultaría el movimiento del receptor y del propio cable para la salida de la batería.
Presentar el servo y cortar el exceso de alambre.
Mientras el cable del servo de alerones va por la parte inferior del ala, el tornillo que fija los push-rod quedará accesible por la parte superior, de otro modo rozaría o sería necesario un tornillo M2 sin cabeza, para el que se necesitaría utilizar una llave allen de 9mm.
Ajustar la unión al servo para un trimado en posición neutra. Al presionar los alambres, ambos deben quedar entre el tornillo que los comprime y las paredes del hueco que ocupan y no presionándose los alambres entre entre sí, pues se facilita que posteriormente suceda un movimiento que los liberaría ambos alambres por completo.


Para evitar un exceso de cables que entorpecen al poner y sacar la batería, dificultan la ventilación y aumentan la posibilidad de una avería durante la manipulación o en caso de impacto, en los tres crash-kit construídos he optado por hacer uan ranura por la parte inferior del fuselaje que oculta los cables que van desde los servos de cola (y el salvalipos cuando lo hay) hasta el receptor, haciéndolos aparecer por la parte delantera de la cabina para que flexionándolos, se puede apartar lo suficiente el receptor como para introducir cómodamente la batería.
La longitud de los cables debe ser tal que permita extraer por completo el receptor y apartarlo a un lado. Para ello, deberemos prolongar los cables de los servos, y el modo más práctico me parece soldando, pues evitamos el peso de dos pares de conectores adicionales, el espacio que ocupan y el riesgo (fácilmente salvable) de que se desconectasen. Al soldar los cables de los servos, deberemos verificar la resistencia mecánica cada soldadura y emplear individualmente tubo termorretráctil.

Para introducir los cables en el fuselaje, con un cúter practicaremos un corte por la zona previamente marcada con un rotulador vigilando la posición y profundidad de la cuchilla para que no salga por el otro lado. En la zona que albergará las uniones, marcamos un rectángulo y vaciamos, creando un hueco para que entre todo sin deformar el fuselaje. Una vez introducidos los cables, en los puntos críticos, como es la salida del cable en la cabina y el hueco de los alargos, con pegamento caliente o similar, reforzamos la zona.
Según mis pruebas, el centro de gravedad más adecuado para un vuelo lento, con secuencias de trepada/planeo, es a 32mm del borde de ataque. Más atrasado se vuelve difícilmente gobernable, y más adelantado flota poco. Cuando el viento supera los 30 km/h, o por densidad del aire, turbulencias u otras dificultades se hace difícil manejar el modelo, adelantar el centro de gravedad ligeramente, por ejemplo, poniendo la batería 1 cm más adelante, facilita el control.
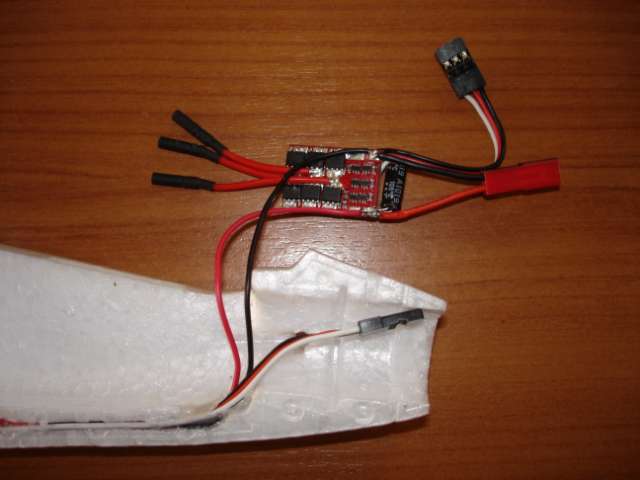

Para facilitar la refrigeración y manipulación, los cables del ESC conviene acortarlos antes de instalar los conectores que van al motor, permitiendo suficiente movilidad para introducir y extraer la batería. A los cables que provienen del motor, más rígidos, si les hacemos un pliegue largo en forma de S que los acorte, conseguiremos también repartir los puntos de plexión para dificultar su rotura.
En la alimentación del ESC, instalamos un conector JST Macho (el de pines puntiagudos) observando también uan longitud corta para evitar exceso de cables en la cabina.
Según cuál vaya a ser al posición final del ESC, cerca de la batería o cerca del motor, el cable del ESC al receptor puede convenir que además de acortarlo, lo giremos para hacerlo salir por el extremo contrario del ESC. Si hacemos soldaduras en el ESC, será necesario cubrirlo nuevamente con termorretráctil.
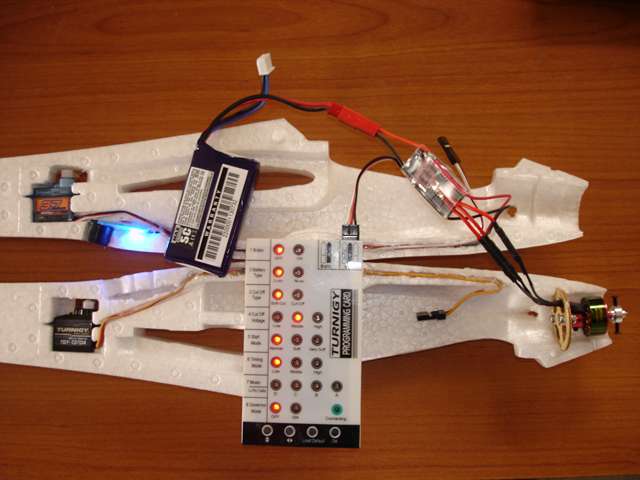
La configuración del ESC que sugiero es la siguiente:
Brake (freno): Off (apagado) con hélice fija, On (encendido) con hélice plegable.
Battery Type (tipo de batería): Li-xx (Litio).
Cut Off Type (tipo de corte de motor): Soft-Cut (suave).
Cut Off Voltage (voltaje de corte): High (alto).
Start Mode (modo de arranque): Hasta el motor 2900kv y con la hélice original, parece no tener problemas con el Normal. Poner Soft (suave) si muestra dificultad de arranque, se usa un motor más revolucionado o hay temor por la integridad de la hélice.
Timing Mode (avance de motor): Low (bajo) ha dado buen resultado en todos los motores probados.
Music/Li-Po Cells (música/celdas LiPo): A (2 celdas).
Governor Mode: Off (apagado), sólo se utiliza para helicópteros.






Copyright ©2010-2023. Todos los derechos reservados.